Să fie fixat un sistem de coordonate dreptunghiular în spațiu tridimensional Oxyz, punct dat, drept a și este necesar să se găsească distanța față de punct ȘI la drept a.
Vom arăta două moduri de a calcula distanța de la un punct la o linie dreaptă în spațiu. În primul caz, găsirea distanței de la punct M 1 la drept a se reduce la găsirea distanței de la un punct M 1 până la punctul H 1 Unde H 1 - baza perpendicularului a scăzut din punct M 1 pe o linie dreaptă a... În al doilea caz, distanța de la punct la plan va fi găsită ca înălțimea paralelogramului.
Asadar, haideti sa începem.
Prima modalitate de a găsi distanța de la punct la linia a în spațiu.
Deoarece prin definiție distanța de la punct M 1
la drept a Este lungimea perpendicularei M 1
H 1
, apoi, după ce am determinat coordonatele punctului H 1
, vom putea calcula distanța necesară ca distanță între puncte ![]() și
și ![]() conform formulei.
conform formulei.
Astfel, problema se reduce la găsirea coordonatelor bazei perpendicularei construite din punct M 1 la drept a... Acest lucru este destul de ușor: punct H 1 Este punctul de intersecție al liniei drepte a cu un avion care trece prin punct M 1 perpendicular pe linia dreaptă a.

Prin urmare, algoritm pentru determinarea distanței de la un punct ![]() la drepta
in spatiueste acesta:
la drepta
in spatiueste acesta:
A doua metodă vă permite să găsiți distanța de la un punct la o dreaptă a în spațiu.
Deoarece în enunțul problemei ni se dă o linie dreaptă a, atunci putem defini vectorul său de direcție ![]() și coordonatele unui anumit punct M 3
întins pe o linie dreaptă a... Apoi coordonatele punctelor și
și coordonatele unui anumit punct M 3
întins pe o linie dreaptă a... Apoi coordonatele punctelor și ![]() putem calcula coordonatele unui vector: (dacă este necesar, consultați coordonatele articolului unui vector prin coordonatele punctelor sale de început și de sfârșit).
putem calcula coordonatele unui vector: (dacă este necesar, consultați coordonatele articolului unui vector prin coordonatele punctelor sale de început și de sfârșit).
Lasă deoparte vectorii ![]() și din punct M 3
și construiește un paralelogram pe ele. În acest paralelogram desenăm înălțimea M 1
H 1
.
și din punct M 3
și construiește un paralelogram pe ele. În acest paralelogram desenăm înălțimea M 1
H 1
.

Evident înălțimea M 1 H 1 paralelogramului construit este egal cu distanța necesară față de punct M 1 la drept a... O vom găsi.
Pe de o parte, aria paralelogramului (o denotăm S) pot fi găsite în termenii produsului vectorial al vectorilor ![]() și prin formula
și prin formula  ... Pe de altă parte, aria unui paralelogram este egală cu produsul lungimii laturii sale de înălțime, adică
... Pe de altă parte, aria unui paralelogram este egală cu produsul lungimii laturii sale de înălțime, adică ![]() Unde
Unde ![]() - lungimea vectorului
- lungimea vectorului ![]() egală cu lungimea laturii paralelogramului luat în considerare. Prin urmare, distanța de la un punct dat M 1
la o linie dreaptă dată a pot fi găsite din egalitate
egală cu lungimea laturii paralelogramului luat în considerare. Prin urmare, distanța de la un punct dat M 1
la o linie dreaptă dată a pot fi găsite din egalitate  la fel de
la fel de  .
.
Asa de, pentru a găsi distanța de la un punct ![]() la drepta
în spațiu aveți nevoie
la drepta
în spațiu aveți nevoie
Rezolvarea problemelor la găsirea distanței de la un punct dat la o linie dreaptă dată în spațiu.
Să luăm în considerare soluția unui exemplu.
Exemplu.
Găsiți distanța de la punct ![]() la drept
la drept ![]() .
.
Decizie.
Prima cale.
Să scriem ecuația planului care trece prin punct M 1 perpendicular pe o dreaptă dată:
Găsiți coordonatele punctului H 1
- punctele de intersecție ale planului și o dreaptă dată. Pentru a face acest lucru, facem trecerea de la ecuațiile canonice ale dreptei la ecuațiile a două planuri care se intersectează 
după care rezolvăm sistemul de ecuații liniare  metoda lui Cramer:
metoda lui Cramer: 
În acest fel, .
Rămâne să calculați distanța necesară de la un punct la o linie dreaptă ca distanță între puncte ![]() și:.
și:.
A doua cale.
Numerele din numitorii fracțiilor din ecuațiile canonice ale unei drepte reprezintă coordonatele corespunzătoare ale vectorului de direcție al acestei drepte, adică ![]() - vectorul director al unei linii drepte
- vectorul director al unei linii drepte ![]() ... Să-i calculăm lungimea:
... Să-i calculăm lungimea:  .
.
Evident, linia dreaptă ![]() trece prin punct
trece prin punct ![]() , apoi vectorul începând de la punctul
, apoi vectorul începând de la punctul ![]() și se termină la punct
și se termină la punct ![]() există
există ![]() ... Găsiți produsul vectorial al vectorilor
... Găsiți produsul vectorial al vectorilor ![]() și
și ![]() :
:
 atunci lungimea acestui produs încrucișat este
atunci lungimea acestui produs încrucișat este  .
.
Acum avem toate datele pentru a utiliza formula pentru a calcula distanța de la un punct dat la un plan dat:  .
.
Răspuns:
Aranjarea reciprocă a liniilor drepte în spațiu
Universitatea Tehnică Marină de Stat din Sankt Petersburg
Departament grafică pe computer și asistență informațională
LECȚIA 3
PRACTICĂ SARCINA №3
Determină distanța de la un punct la o dreaptă.
Puteți determina distanța dintre un punct și o linie dreaptă efectuând următoarele construcții (a se vedea Fig. 1):
Din punct DIN coborâți perpendicularul pe o linie dreaptă și;
Marcați punctul LA intersecția unei perpendiculare cu o dreaptă;
Măsurați dimensiunea segmentului KSA cărui origine este punctul specificat și sfârșitul punctului de intersecție marcat.
Fig. 1. Distanța de la punct la linie.
Soluția la problemele de acest tip se bazează pe regula de proiecție unghi drept: un unghi drept este proiectat fără distorsiuni dacă cel puțin o parte a acestuia este paralelă cu planul de proiecție (adică ocupă o poziție privată). Să începem doar cu un astfel de caz și să luăm în considerare construcțiile pentru determinarea distanței de la un punct DINla un segment de linie dreaptă AB.
Nu există cazuri de testare în această sarcină, iar opțiunile pentru îndeplinirea sarcinilor individuale sunt prezentate în table1 și table2... Soluția la problemă este descrisă mai jos, iar construcțiile corespunzătoare sunt prezentate în Fig. 2.
1. Determinarea distanței de la un punct la o linie a unei anumite poziții.
În primul rând, sunt construite proiecții ale unui punct și unui segment. Proiecție A1B1 paralel cu axa X... Aceasta înseamnă că segmentul AB paralel cu planul P2... Dacă din punct DIN trasează o perpendiculară pe AB, atunci unghiul drept este proiectat fără distorsiuni exact pe plan P2... Acest lucru vă permite să desenați o perpendiculară din punct C2pe proiecție A2B2.
Meniu derulant Desen-Segment (A desena- Linia) . Poziționați cursorul în poziție C2 și fixați-l ca primul punct al segmentului de linie. Deplasați cursorul în direcția normală către linie A2B2 și fixați al doilea punct pe el în momentul în care apare promptul Normal (Perpendicular) ... Marcați punctul construit K2... Activați modul ORTHO (ORTHO) , și din punct K2desenați o legătură verticală înainte de a traversa proiecția A1 B1 ... Punctul de intersecție este desemnat de K1... Punct LAîntins pe segment AB, este punctul de intersecție al perpendicularului trasat din punct DIN, cu segment AB... Astfel, segmentul KS este distanța necesară de la un punct la o linie dreaptă.
Se poate observa din construcțiile că segmentul KS ia poziția generală și, prin urmare, proiecțiile sale sunt distorsionate. Când vorbim despre distanță, ne referim întotdeauna valoarea segmentului adevăratexprimarea distanței. Prin urmare, este necesar să se găsească adevărata valoare a segmentului KS,transformându-l într-o poziție privată, de exemplu KS|| P1... Rezultatul construcțiilor este prezentat în Fig. 2.
Din construcțiile prezentate în Fig. 2, putem concluziona: poziția particulară a liniei drepte (segmentul este paralel P1 sau P2) vă permite să construiți rapid proiecții ale distanței de la un punct la o linie dreaptă, dar în același timp acestea sunt distorsionate.

Fig. 2. Determinarea distanței de la un punct la o linie a unei anumite poziții.
2. Determinarea distanței de la un punct la o linie dreaptă în poziție generală.
Segmentul nu ia întotdeauna o anumită poziție în starea inițială. În general poziția de plecare se realizează următoarele construcții pentru a determina distanța de la un punct la o linie dreaptă:
a) folosind metoda de conversie a desenului, traduceți segmentul din poziția generală în particular - acest lucru vă va permite să construiți proiecții ale distanței (distorsionate);
b) folosind metoda din nou, traduceți segmentul corespunzător distanței dorite într-o anumită poziție - obținem proiecția distanței în magnitudine egală cu cea reală.
Luați în considerare succesiunea construcțiilor pentru determinarea distanței de la punct ȘIla un segment în poziție generală Soare(fig. 3).
La prima rotire trebuie să obțineți poziția specială a segmentului LAC... Pentru aceasta în strat TMR trebuie să conectați punctele AT 2, C2 și A2... Folosind comanda Schimbare-Rotire (Modifica – Roti) triunghi B2C2A2 rotiți în jurul punctului C2 în poziția în care noua proiecție B2 * C2 vor fi amplasate strict orizontal (punctul DIN este fix și, prin urmare, noua sa proiecție coincide cu cea originală și desemnarea C2 * și C1 * poate să nu fie afișat în desen). Ca urmare, vor fi obținute noi proiecții ale segmentului B2 * C2 și puncte: A2 *. Mai departe de puncte A2 * și AT 2 * sunt verticale și din puncte ÎN 1 și A1 linii orizontale de comunicare. Intersecția liniilor corespunzătoare va defini poziția punctelor noii proiecții orizontale: linie B1 * C1și puncte A1 *.
În poziția particulară obținută, puteți construi proiecții la distanță pentru acest lucru: din punct A1 *normal la B1 * C1.Punctul intersecției lor reciproce este K1 *.Din acest punct, se trasează o linie de comunicație verticală până se intersectează cu proiecția B2 * C2.Punctul este marcat K2 *. Ca urmare, proiecțiile segmentului AK, care este distanța necesară față de punct ȘIla un segment de linie dreaptă Soare.
Apoi, trebuie să construiți proiecții ale distanței în starea inițială. Pentru a face acest lucru, din punct de vedere K1 * este convenabil să trasați o linie orizontală până la intersecția cu proiecția B1C1 și marcați punctul de intersecție K1. Apoi se atrage un punct K2 pe proiecția frontală a segmentului și proiecții A1K1 și A2K2.Ca rezultat al construcțiilor, s-au obținut proiecții ale distanței, dar și în poziția inițială și în noua poziție particulară a segmentului Soare,segment de linie AKocupă o poziție generală, iar acest lucru duce la faptul că toate proiecțiile sale sunt distorsionate.
La a doua rotire trebuie să rotiți segmentul AK într-o anumită poziție, care vă va permite să determinați adevărata valoare a distanței - proiecție A2 * K2 **. Rezultatul tuturor construcțiilor este prezentat în Fig. 3.

TASK №3-1. DIN la linia dreaptă a poziției particulare dată de segment AB... Dați răspunsul în mm (Tabelul 1).Eliminați liniile de proiectare
tabelul 1
TASK №3-2.Găsiți distanța reală de la un punct M la o linie dreaptă în poziție generală definită de un segment ED... Dați răspunsul în mm (masa 2).
masa 2
Verificarea și compensarea TASK №3 finalizat.
155 *. Determinați dimensiunea reală a segmentului de linie AB în poziția generală (Fig. 153, a).
Decizie. După cum știți, proiecția unui segment de linie dreaptă pe orice plan este egală cu segmentul în sine (ținând cont de scara desenului) dacă este paralelă cu acest plan
(Fig. 153, b). Din aceasta rezultă că prin transformarea desenului este necesar să se realizeze paralelismul acestui segment al pătratului. V sau pl. H sau completează sistemul V, H cu un alt plan perpendicular pe pl. V sau la pl. H și în același timp paralel cu acest segment.
În fig. 153, în prezintă introducerea unui plan suplimentar S, perpendicular pe pl. H și paralel cu un segment dat AB.
Proiecția a s b s este egală cu valoarea naturală a segmentului AB.
În fig. 153, d prezintă o altă tehnică: segmentul AB este rotit în jurul unei linii drepte care trece prin punctul B și perpendicular pe pl. H, într-o poziție paralelă
pl. V. În acest caz, punctul B rămâne la locul său, iar punctul A ia o nouă poziție A 1. Orizontul se află într-o poziție nouă. proiecție а 1 b || axa x. Proiecția a "1 b" este egală cu valoarea naturală a segmentului AB.

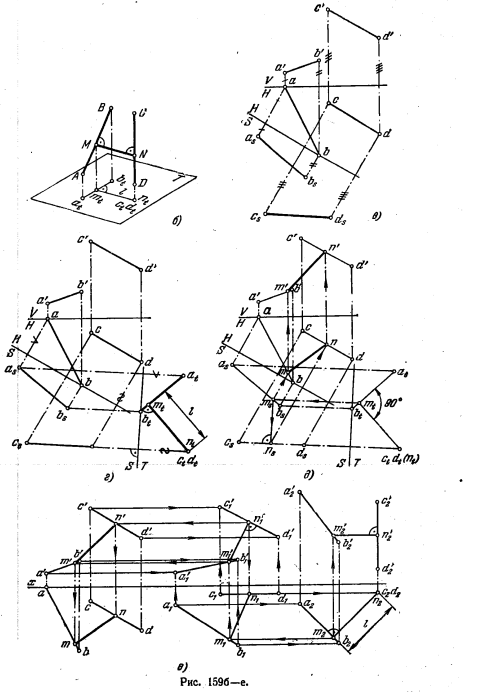
156. Se dă o piramidă SABCD (fig. 154). Determinați dimensiunea reală a marginilor piramidei AS și CS, utilizând metoda de modificare a planurilor de proiecție, și marginile BS și DS, folosind metoda de rotație, și luați axa de rotație perpendiculară pe pătrat. H.
157 *. Determinați distanța de la punctul A la dreapta BC (Fig. 155, a).
Decizie. Distanța de la un punct la o linie dreaptă este măsurată de un segment perpendicular trasat dintr-un punct la o linie dreaptă.
Dacă linia dreaptă este perpendiculară pe orice plan (Fig. 155.6), atunci distanța de la punct la dreapta se măsoară prin distanța dintre proiecția punctului și proiecția punctului liniei drepte pe acest plan. Dacă o linie dreaptă ocupă o poziție generală în sistemul V, H, atunci pentru a determina distanța de la un punct la o dreaptă prin schimbarea planurilor de proiecție, trebuie introduse două planuri suplimentare în sistemul V, H.
Mai întâi (Fig. 155, c) intrăm în pl. S paralel cu segmentul BC (noua axă S / H este paralelă cu proiecția bc) și construiește proiecțiile b s c s și a s. Apoi (Fig. 155, d) introducem un alt pl. T perpendicular pe dreapta BC (axa T / S nouă perpendicular pe b s c s). Construim proiecții ale unei linii și a unui punct - cu t (b t) și a t. Distanța dintre punctele a t și cu t (b t) este egală cu distanța l de la punctul A la dreapta BC.
În fig. 155e, aceeași sarcină este realizată folosind metoda de rotație în forma sa, care se numește metoda mișcării paralele. În primul rând, linia dreaptă BC și punctul A, menținându-și poziția reciprocă neschimbată, întoarce unele (neindicate în desen) linie dreaptă perpendiculară pe pl. H, astfel încât linia BC să fie paralelă cu pătratul. V. Aceasta echivalează cu punctele în mișcare A, B, C în planuri paralele cu pătratul. H. În acest caz, orizontul. proiecția unui sistem dat (BC + A) nu se schimbă nici în mărime, nici în configurație, doar poziția sa față de axa x se schimbă. Poziționăm orizontul. proiecția dreptei BC paralelă cu axa x (poziția b 1 c 1) și definiți proiecția a 1, amânând c 1 1 1 \u003d c-1 și a 1 1 1 \u003d a-1 și a 1 1 1 ⊥ c 1 1 1. Tragând linii drepte b "b" 1, a "a" 1, c "c" 1 paralel cu axa x, găsim fața pe ele. proiecția b "1, a" 1, c "1. Apoi, mutăm punctele B 1, C 1 și A 1 în planuri paralele cu pătratul V (de asemenea, fără a le schimba poziția relativă), astfel încât să obținem B 2 C 2 ⊥ pătrat H. În acest caz, proiecția liniei drepte va fi localizată perpendicular pe axele x, b 2 c "2 \u003d b" 1 c "1, iar pentru a construi proiecția a" 2, luați b "2 2" 2 \u003d b "1 2" 1, desenați 2 "a" 2 ⊥ b "2 c" 2 și amânați a "2 2" 2 \u003d a "1 2" 1. Acum, după ce ați cheltuit de la 1 la 2 și de la 1 la 2 || x 1 obținem proiecții b 2 cu 2 și a 2 și distanța necesară l de la punctul A la dreapta BC. Puteți determina distanța de la A la BC prin rotirea planului definit de punctul A și linia BC în jurul orizontalei acestui plan până la poziția T || pl. H (Fig. 155, f).
În planul stabilit de punctul A și de dreapta BC, trageți o linie orizontală A-1 (Fig. 155, g) și rotiți punctul B în jurul său. Punctul B se deplasează în pătrat. R (dat în desen de traseul R h), perpendicular pe A-1; în punctul O este centrul de rotație al punctului B. Acum determinăm valoarea reală a razei de rotație a VO, (Fig. 155, c). În poziția necesară, adică atunci când pl. T, definit de punctul A și linia BC, va deveni || pl. H, punctul B va apărea pe R h la o distanță Ob 1 de punctul O (poate exista o altă poziție pe aceeași cale R h, dar pe cealaltă parte a lui O). Punctul b 1 este orizontul. proiecția punctului B după deplasarea acestuia în poziția B 1 în spațiu, când planul definit de punctul A și linia BC a luat poziția T.
După ce am trasat (Fig. 155, i) linia dreaptă b 1 1, obținem orizontul. proiecția liniei drepte BC, deja situată || pl. H în același plan cu A. În această poziție, distanța de la a la b 1 1 este egală cu distanța dorită l. Planul P, în care se află elementele date, poate fi combinat cu pl. H (Fig. 155, k), rotire pl. Orizontul din jurul ei. urmă. Trecând de la specificarea planului prin punctul A și dreapta BC la specificarea liniilor drepte BC și A-1 (Fig. 155, l), găsim urme ale acestor linii drepte și trasăm urme P ϑ și P h prin ele. Construim (Fig. 155, m) combinat cu pl. Poziția H față. urmă - P ϑ0.
Desenați orizontul prin punctul a. proiecție frontală; frontalul aliniat trece prin punctul 2 pe pista Рh paralelă cu Р ϑ0. Punctul A 0 - combinat cu pl. H este poziția punctului A. În mod similar, găsim punctul B 0. Soare direct combinat cu pl. Poziția H trece prin punctul B 0 și punctul m (linia orizontală).
Distanța de la punctul A 0 la linia B 0 C 0 este egală cu distanța necesară l.
Puteți efectua construcția indicată, găsind o singură urmă P h (Fig. 155, n și o). Întreaga construcție este similară cu o întoarcere în jurul orizontalei (vezi Fig. 155, g, c, i): urmele Рh sunt unul dintre contururile pătratului. R.
Dintre metodele de transformare a unui desen date pentru rezolvarea acestei probleme, este preferată metoda de rotație în jurul unui orizontal sau frontal.



158. Piramida dată SABC (fig. 156). Determinați distanțele:
a) de la partea superioară B a bazei până la partea laterală AC prin mișcare paralelă;
b) de la vârful piramidei S până la laturile BC și AB ale bazei prin rotire în jurul orizontalei;
c) de la partea de sus S la partea AC a bazei prin schimbarea planurilor de proiecție.

159. Se dă o prismă (fig. 157). Determinați distanțele:
a) între muchiile AD și CF prin schimbarea planurilor de proiecție;
b) între coastele BE și CF prin rotație în jurul frontalului;
c) între muchiile AD și BE prin mișcare paralelă.
160. Determinați dimensiunea reală a patrulaterului ABCD (Fig. 158) alinindu-l cu pl. H. Folosiți doar urmele plane orizontale.
161 *. Determinați distanța dintre liniile de traversare AB și CD (Fig. 159, a) și construiți proiecții ale comunei perpendiculare pe ele.
Decizie. Distanța dintre liniile încrucișate este măsurată de segmentul (MN) al perpendicularei față de ambele linii (Fig. 159, b). Evident, dacă una dintre drepte este plasată perpendicular pe orice pătrat. Atunci atunci


segmentul MN al perpendicularei pe ambele linii va fi paralel cu pătratul. Proiecția T pe acest plan va afișa distanța dorită. Proiecția menadului unghi drept MN n AB pe pătrat. T este, de asemenea, un unghi drept între m t n t și a t b t, deoarece una dintre laturile unghiului drept AMN, și anume MN. paralel cu pl. T.
În fig. 159, c și d distanța dorită l este determinată de metoda de schimbare a planurilor de proiecție. Mai întâi, introducem un pătrat suplimentar. proiecțiile S, perpendiculare pe pl. H și paralel cu linia dreaptă CD (Fig. 159, c). Apoi introducem un alt pătrat suplimentar. T, perpendicular pe pl. S și \u200b\u200bperpendicular pe aceeași linie dreaptă CD (Fig. 159, d). Acum puteți construi o proiecție a perpendicularului comun trasând m t n t din punctul c t (d t) perpendicular pe proiecția a t b t. Punctele m t și n t sunt proiecții ale punctelor de intersecție ale acestei perpendiculare cu drepte AB și CD. În punctul m t (Fig. 159, e) găsim m s pe a s b s: proiecția m s n s ar trebui să fie paralelă cu axa T / S. Mai departe, prin m s și n s găsim m și n pe ab și cd, iar pe ele m "și n" pe a "b" și c "d".
În fig. 159, c arată soluția la această problemă prin metoda mișcărilor paralele. Mai întâi, punem un CD drept paralel cu pătratul. V: proiecție c 1 d 1 || X. Apoi, mutăm liniile drepte CD și AB din pozițiile C 1 D 1 și A 1 B 1 în pozițiile C 2 B 2 și A 2 B 2 astfel încât C 2 D 2 să fie perpendiculară pe H: proiecție cu „2 d” 2 ⊥ x. Segmentul perpendicularului necesar este situat || pl. H și, prin urmare, m 2 n 2 exprimă distanța dorită l între AB și CD. Găsiți poziția proiecțiilor m "2 și n" 2 pe un "2 b" 2 și c "2 d" 2, apoi proiecțiile și m 1 și m "1, n 1 și n" 1 și, în cele din urmă, proiecțiile m "și n ", m și n.
162. Având în vedere o piramidă SABC (fig. 160). Determinați distanța dintre marginea SB și latura AC a bazei piramidei și construiți proiecții ale perpendicularei comune cu SB și AC, aplicând metoda schimbării planurilor de proiecție.

163. Având în vedere o piramidă SABC (fig. 161). Determinați distanța dintre marginea SH și partea BC a bazei piramidei și construiți proiecția perpendicularului comun cu SX și BC, aplicând metoda mișcării paralele.
164 *. Determinați distanța de la punctul A la plan în cazurile în care planul este dat: a) de triunghiul BCD (Fig. 162, a); b) urme (Fig. 162, b).
Decizie. După cum știți, distanța de la un punct la un plan se măsoară prin valoarea unei perpendiculare trasate de la un punct la un plan. Această distanță este proiectată pe orice pătrat. proiecții în mărime naturală, dacă acest plan este perpendicular pe pătrat. proiecții (Fig. 162, c). Această situație poate fi realizată prin transformarea desenului, de exemplu, prin schimbarea pătratului. proiecții. Introducem pl. S (Fig. 16c, d), perpendicular pe pl. triunghi BCD. Pentru a face acest lucru, cheltuim în pl. triunghi orizontal B-1 și așezați axa de proiecție S perpendiculară pe proiecția b-1 a orizontalei. Construim proiecții ale unui punct și un plan - a s și un segment c s d s. Distanța de la a s la c s d s este egală cu distanța necesară l a punctului către plan.
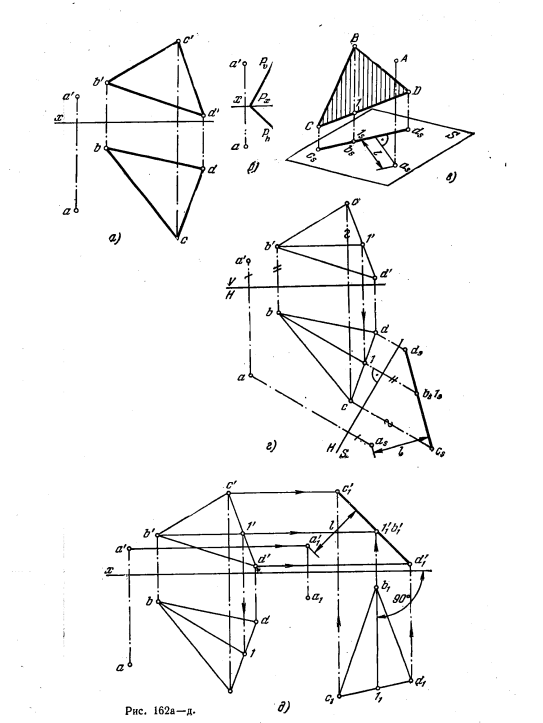
Pe Rio. 162, se aplică metoda mișcării paralele. Mutați întregul sistem până când orizontala planului B-1 este perpendiculară pe planul V: proiecția b 1 1 1 trebuie să fie perpendiculară pe axa x. În această poziție, planul triunghiului va deveni proiecție frontală, iar distanța l de la punctul A la acesta se va dovedi pătrată. V fără distorsiuni.

În fig. 162, b planul este definit de urme. Introducem (Fig. 162, e) un pătrat suplimentar. S, perpendicular pe pl. P: Axa S / H perpendiculară pe P h. Restul este clar din desen. În fig. 162, problema a fost rezolvată cu o singură mișcare: pl. P merge în poziția P 1, adică devine proiecție frontală. Urmări. Р 1h este perpendicular pe axa x. Construim un front în această poziție a avionului. urmă orizontală - punctul n "1, n 1. Urma P 1ϑ va trece prin P 1x și n 1. Distanța de la un" 1 la P 1ϑ este egală cu distanța dorită l.
165. Se dă piramida SABC (vezi fig. 160). Determinați distanța de la punctul A la fața SBC a piramidei folosind metoda mișcării paralele.
166. Având în vedere o piramidă SABC (vezi fig. 161). Determinați înălțimea piramidei folosind metoda mișcării paralele.
167 *. Determinați distanța dintre liniile de intersecție AB și CD (a se vedea Fig. 159, a) ca distanță între planurile paralele trasate prin aceste linii.

Decizie. În fig. 163, și prezintă planurile paralele P și Q, dintre care pl. Q se realizează prin CD paralel cu AB și pl. R - prin AB paralel cu pl. Q. Distanța dintre astfel de planuri este distanța dintre liniile de trecere AB și CD. Cu toate acestea, vă puteți limita la construirea unui singur plan, de exemplu, Q, paralel cu AB, și apoi să determinați distanța de la cel puțin punctul A la acest plan.
În fig. 163c prezintă planul Q trasat prin CD paralel cu AB; în proiecții desenate cu „e” || a "b" și ce || ab. Aplicarea metodei de schimbare a pătratului. proiecții (Fig. 163, c), introducem un pătrat suplimentar. S, perpendicular pe pl. V și în același timp

perpendicular pe pl. Î. Pentru a desena axa S / V, luați frontala D-1 în acest plan. Acum trasăm S / V perpendicular pe d "1" (Fig. 163, c). Pl. Q va fi afișat pe pl. S ca o linie dreaptă cu s d s. Restul este clar din desen.
168. Având în vedere piramida SABC (vezi fig. 160). Determinați distanța dintre marginile SC și AB. Aplicați: 1) metoda de schimbare a pătratului. proiecții, 2) o metodă de mișcare paralelă.
169 *. Determinați distanța dintre planurile paralele, dintre care una este dată de drepte AB și AC, iar cealaltă de drepte DE și DF (Fig. 164, a). De asemenea, efectuați construcția pentru cazul în care planurile sunt date de urme (Fig. 164, b).
Decizie. Distanța (Fig. 164, c) între planurile paralele poate fi determinată trasând o perpendiculară din orice punct al unui plan pe altul. În fig. 164, g a introdus o pl. Suplimentară. S perpendicular pe pl. H și ambelor planuri date. Axa S.H este perpendiculară pe orizont. proiecție orizontală trasată într-unul dintre planuri. Construim o proiecție a acestui plan și un punct într-un alt plan de pe pătrat. 5. Distanța punctului d s față de linia dreaptă l s a s este egală cu distanța necesară între planurile paralele.
În fig. 164, d este dată o altă construcție (conform metodei mișcării paralele). Pentru ca planul, exprimat prin drepte intersectate AB și AC, să fie perpendicular pe pl. V, orizont. proiecția orizontală a acestui plan este stabilită perpendicular pe axa x: 1 1 2 1 ⊥ x. Distanța dintre față. proiecția d "1 punct D și dreapta a" 1 2 "1 (față. proiecția planului) este egală cu distanța necesară între planuri.


În fig. 164, e arată introducerea unui pl suplimentar. S, perpendicular pe aria H și pe planurile date P și Q (axa S / H este perpendiculară pe urmele P h și Q h). Construim urme P s și Q s. Distanța dintre ele (vezi Fig. 164, c) este egală cu distanța necesară l între planurile P și Q.
În fig. 164, g arată mișcarea planurilor P 1 n Q 1, în poziția P 1 și Q 1, când orizontul. pistele se dovedesc a fi perpendiculare pe axa x. Distanța dintre fața nouă. prin urmele P 1ϑ și Q 1ϑ este egală cu distanța necesară l.
170. Având în vedere un paralelipiped ABCDEFGH (fig. 165). Determinați distanțele: a) între bazele paralelipipedului - l 1; b) între fețele ABFE și DCGH - l 2; c) între muchiile ADHE și BCGF-l 3.
Distanța de la un punct la o linie este lungimea perpendicularului căzut de la un punct la o linie. În geometria descriptivă, este determinată grafic folosind algoritmul de mai jos.
Algoritm
- Linia dreaptă este transferată într-o poziție în care va fi paralelă cu orice plan de proiecție. Pentru aceasta se folosesc metode de transformare a proiecțiilor ortogonale.
- Dintr-un punct, se trasează o perpendiculară pe o linie dreaptă. Această construcție se bazează pe teorema de proiecție a unghiului drept.
- Lungimea unei perpendiculare este determinată prin transformarea proiecțiilor sale sau folosind metoda triunghiului dreptunghiular.
Figura următoare prezintă un desen complex al punctului M și al liniei b definite de segmentul CD. Este necesar să se găsească distanța dintre ele.
Conform algoritmului nostru, primul lucru de făcut este să deplasăm linia într-o poziție paralelă cu planul de proiecție. Este important să înțelegem că după transformări, distanța reală dintre punct și linie nu ar trebui să se schimbe. De aceea este convenabil să folosiți aici metoda de înlocuire a planurilor, care nu implică figuri în mișcare în spațiu.
Rezultatele primei etape de construcție sunt prezentate mai jos. Figura arată cum un plan frontal suplimentar P 4 este introdus paralel cu b. În noul sistem (P 1, P 4) punctele C "" 1, D "" 1, M "" 1 sunt la aceeași distanță de axa X 1 ca C "", D "", M "" de la axă X.

Efectuând a doua parte a algoritmului, de la M "" 1 coborâm perpendicularul M "" 1 N "" 1 la linia dreaptă b "" 1, deoarece unghiul drept MND între b și MN este proiectat pe planul P 4 în dimensiune completă. Pe linia de comunicație, determinăm poziția punctului N "și realizăm proiecția M" N "a segmentului MN.

În etapa finală, trebuie să determinați valoarea segmentului MN prin proiecțiile sale M "N" și M "" 1 N "" 1. Pentru aceasta construim triunghi dreptunghic M "" 1 N "" 1 N 0, în care piciorul N "" 1 N 0 este egal cu diferența (Y M 1 - Y N 1) a îndepărtării punctelor M "și N" de pe axa X 1. Lungimea hipotenuzei M "" 1 N 0 a triunghiului M "" 1 N "" 1 N 0 corespunde distanței dorite de la M la b.

A doua soluție
- În paralel cu CD, introducem un nou plan frontal P 4. Se intersectează П 1 de-a lungul axei X 1 și X 1 ∥C "D". În conformitate cu metoda de înlocuire a planurilor, determinăm proiecțiile punctelor C "" 1, D "" 1 și M "" 1, așa cum se arată în figură.
- Perpendicular la C "" 1 D "" 1 construim un plan orizontal suplimentar P 5, pe care linia dreaptă b este proiectată până la punctul C "2 \u003d b" 2.
- Distanța dintre punctul M și linia b este determinată de lungimea segmentului M "2 C" 2, marcat cu roșu.

Sarcini similare:
 Ode civile și politice ale lui G
Ode civile și politice ale lui G Propoziții compuse cu două sau mai multe propoziții subordonate Cum se definește un compus compus
Propoziții compuse cu două sau mai multe propoziții subordonate Cum se definește un compus compus Unde să mergi la studii după școală: cum să alegi profesia potrivită
Unde să mergi la studii după școală: cum să alegi profesia potrivită